Quoted from: https://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.121.9220
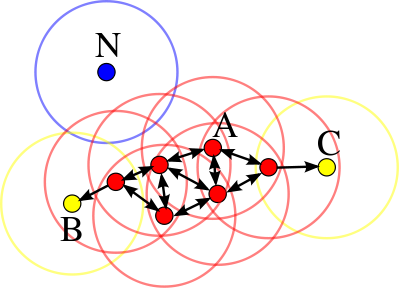
Consider a set of points in some space to be clustered. Let ε be a parameter specifying the radius of a neighborhood with respect to some point. For the purpose of DBSCAN clustering, the points are classified as core points, (density-) reachable points and outliers, as follows:
- A point p is a core point if at least minPts points are within distance ε of it (including p).
- A point q is directly reachable from p if point q is within distance ε from core point p. Points are only said to be directly reachable from core points.
- A point q is reachable from p if there is a path p1, ..., pn with p1 = p and pn = q, where each pi+1 is directly reachable from pi. Note that this implies that the initial point and all points on the path must be core points, with the possible exception of q.
- All points not reachable from any other point are outliers or noise points.
Now if p is a core point, then it forms a cluster together with all points (core or non-core) that are reachable from it. Each cluster contains at least one core point; non-core points can be part of a cluster, but they form its "edge", since they cannot be used to reach more points.
Reachability is not a symmetric relation: by definition, only core points can reach non-core points. The opposite is not true, so a non-core point may be reachable, but nothing can be reached from it. Therefore, a further notion of connectedness is needed to formally define the extent of the clusters found by DBSCAN. Two points p and q are density-connected if there is a point o such that both p and q are reachable from o. Density-connectedness is symmetric.
A cluster then satisfies two properties:
- All points within the cluster are mutually density-connected.
- If a point is density-reachable from some point of the cluster, it is part of the cluster as well.
DBSCAN requires two parameters: ε (eps) and the minimum number of points required to form a dense region (minPts). It starts with an arbitrary starting point that has not been visited. This point's ε-neighborhood is retrieved, and if it contains sufficiently many points, a cluster is started. Otherwise, the point is labeled as noise. Note that this point might later be found in a sufficiently sized ε-environment of a different point and hence be made part of a cluster.
If a point is found to be a dense part of a cluster, its ε-neighborhood is also part of that cluster. Hence, all points that are found within the ε-neighborhood are added, as is their own ε-neighborhood when they are also dense. This process continues until the density-connected cluster is completely found. Then, a new unvisited point is retrieved and processed, leading to the discovery of a further cluster or noise.
The DBSCAN algorithm can be abstracted into the following steps:
- Find the points in the ε (eps) neighborhood of every point, and identify the core points with more than minPts neighbors.
- Find the connected components of core points on the neighbor graph, ignoring all non-core points.
- Assign each non-core point to a nearby cluster if the cluster is an ε (eps) neighbor, otherwise assign it to noise.