Quoted from: http://www.cc.gatech.edu/~thad/p/031_10_SL/real-time-asl-recognition-from%20video-using-hmm-ISCV95.pdf
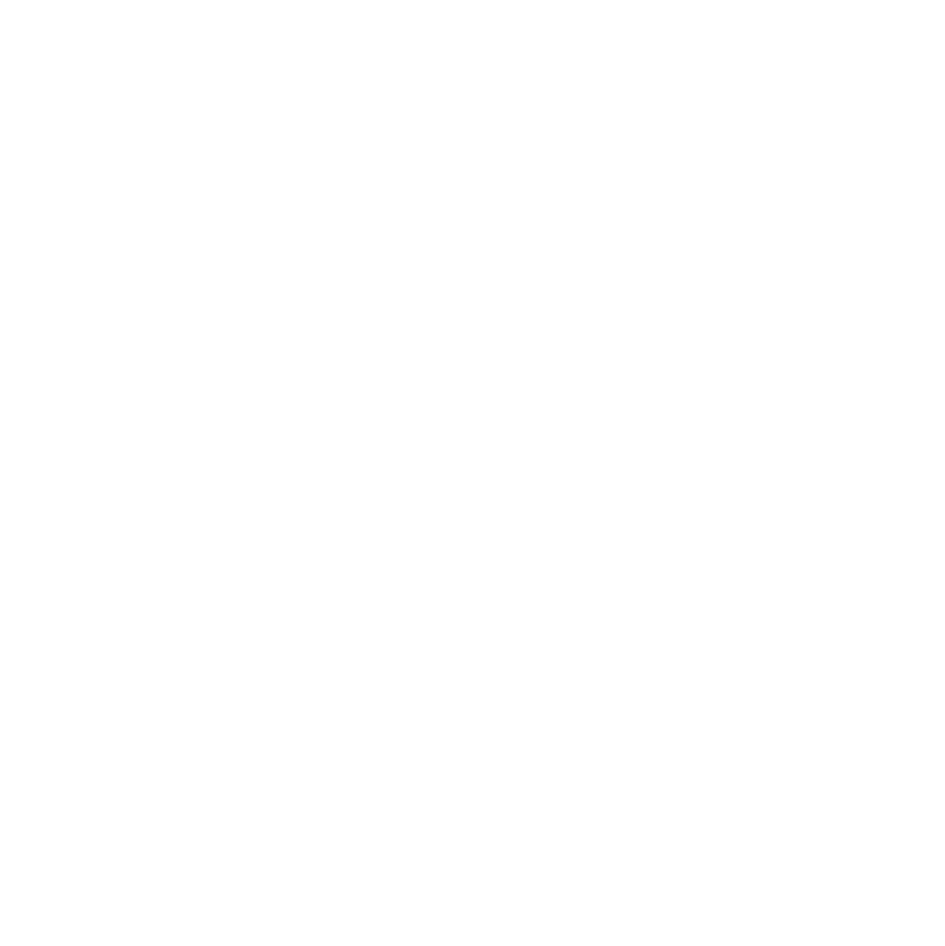
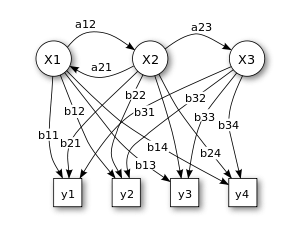
The diagram below shows the general architecture of an instantiated HMM. Each oval shape represents a random variable that can adopt any of a number of values. The random variable x(t) is the hidden state at time t (with the model from the above diagram, x(t) ∈ { x1, x2, x3 }). The random variable y(t) is the observation at time t (with y(t) ∈ { y1, y2, y3, y4 }). The arrows in the diagram (often called a trellis diagram) denote conditional dependencies.
From the diagram, it is clear that the conditional probability distribution of the hidden variable x(t) at time t, given the values of the hidden variable x at all times, depends only on the value of the hidden variable x(t − 1); the values at time t − 2 and before have no influence. This is called the Markov property. Similarly, the value of the observed variable y(t) only depends on the value of the hidden variable x(t) (both at time t).
In the standard type of hidden Markov model considered here, the state space of the hidden variables is discrete, while the observations themselves can either be discrete (typically generated from a categorical distribution) or continuous (typically from a Gaussian distribution). The parameters of a hidden Markov model are of two types, transition probabilities and emission probabilities (also known as output probabilities). The transition probabilities control the way the hidden state at time t is chosen given the hidden state at time {\displaystyle t-1} .
.
The hidden state space is assumed to consist of one of N possible values, modelled as a categorical distribution. (See the section below on extensions for other possibilities.) This means that for each of the N possible states that a hidden variable at time t can be in, there is a transition probability from this state to each of the N possible states of the hidden variable at time {\displaystyle t+1} , for a total of {\displaystyle N^{2}}
, for a total of {\displaystyle N^{2}} transition probabilities. Note that the set of transition probabilities for transitions from any given state must sum to 1. Thus, the {\displaystyle N\times N}
transition probabilities. Note that the set of transition probabilities for transitions from any given state must sum to 1. Thus, the {\displaystyle N\times N} matrix of transition probabilities is a Markov matrix. Because any one transition probability can be determined once the others are known, there are a total of {\displaystyle N(N-1)}
matrix of transition probabilities is a Markov matrix. Because any one transition probability can be determined once the others are known, there are a total of {\displaystyle N(N-1)} transition parameters.
transition parameters.
In addition, for each of the N possible states, there is a set of emission probabilities governing the distribution of the observed variable at a particular time given the state of the hidden variable at that time. The size of this set depends on the nature of the observed variable. For example, if the observed variable is discrete with M possible values, governed by a categorical distribution, there will be {\displaystyle M-1} separate parameters, for a total of {\displaystyle N(M-1)}
separate parameters, for a total of {\displaystyle N(M-1)} emission parameters over all hidden states. On the other hand, if the observed variable is an M-dimensional vector distributed according to an arbitrary multivariate Gaussian distribution, there will be M parameters controlling the means and {\displaystyle {\frac {M(M+1)}{2}}}
emission parameters over all hidden states. On the other hand, if the observed variable is an M-dimensional vector distributed according to an arbitrary multivariate Gaussian distribution, there will be M parameters controlling the means and {\displaystyle {\frac {M(M+1)}{2}}} parameters controlling the covariance matrix, for a total of {\displaystyle N\left(M+{\frac {M(M+1)}{2}}\right)={\frac {NM(M+3)}{2}}=O(NM^{2})}
parameters controlling the covariance matrix, for a total of {\displaystyle N\left(M+{\frac {M(M+1)}{2}}\right)={\frac {NM(M+3)}{2}}=O(NM^{2})} emission parameters. (In such a case, unless the value of M is small, it may be more practical to restrict the nature of the covariances between individual elements of the observation vector, e.g. by assuming that the elements are independent of each other, or less restrictively, are independent of all but a fixed number of adjacent elements.)
emission parameters. (In such a case, unless the value of M is small, it may be more practical to restrict the nature of the covariances between individual elements of the observation vector, e.g. by assuming that the elements are independent of each other, or less restrictively, are independent of all but a fixed number of adjacent elements.)